 5. 四元数表示两个向量旋转
5. 四元数表示两个向量旋转
# 四元数表示两个向量旋转
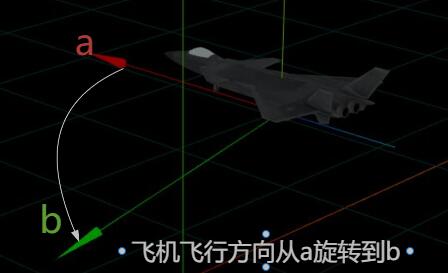
3D空间中有两个向量,一个向量向另外一个向量旋转,这个过程可以用一个四元数表示。
下面给大家介绍一个四元数Quaternion的方法.setFromUnitVectors(a, b),计算参数a到b的旋转。
# 已知条件
已知飞行原来的飞行方向是a表示的方向,需要把飞机飞行方向旋转到向量b表示的方向。
const model = new THREE.Group();
loader.load("../飞机.glb", function (gltf) {
const fly = gltf.scene
model.add(fly);
fly.position.set(10, 10, 0);//相对世界坐标系坐标原点偏移
const axesHelper = new THREE.AxesHelper(10);
fly.add(axesHelper);//用一个坐标轴可视化模型的局部坐标系(本地坐标系)
const a = new THREE.Vector3(0, 0, -1);//飞机初始姿态飞行方向
// 飞机姿态绕自身坐标原点旋转到b指向的方向
const b = new THREE.Vector3(-1, -1, -1).normalize();
})
# 箭头可视化飞机旋转前后的方向
// 可视化飞机方向
const a = new THREE.Vector3(0, 0, -1);//飞机初始姿态飞行方向
const O = fly.position.clone();//飞机位置坐标箭头起点
model.add(new THREE.ArrowHelper(a, O, 30, 0xff0000));
// 飞机姿态绕自身坐标原点旋转到b指向的方向
const b = new THREE.Vector3(-1, -1, -1).normalize();
model.add(new THREE.ArrowHelper(b, O, 30, 0x00ff00));
# .setFromUnitVectors(a, b)生成四元数旋转飞机
四元数Quaternion的方法.setFromUnitVectors(a, b)可以通过两个向量参数a和b,创建一个四元数,表示从向量a表示的方向旋转到向量b表示的方向。(参数a, b是单位向量)
//飞机初始姿态飞行方向a
const a = new THREE.Vector3(0, 0, -1);
// 飞机姿态绕自身坐标原点旋转到b指向的方向
const b = new THREE.Vector3(-1, -1, -1).normalize();
// a旋转到b构成的四元数
const quaternion = new THREE.Quaternion();
//注意两个参数的顺序
quaternion.setFromUnitVectors(a, b);
// quaternion表示的是变化过程,在原来基础上乘以quaternion即可
fly.quaternion.multiply(quaternion);
# 练习题:人旋转
已知人原来的正前方是a表示的方向,需要把人正前方旋转到向量b表示的方向。
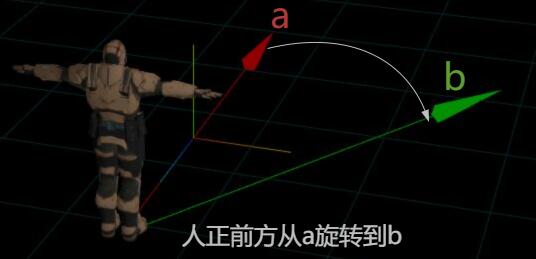
这个旋转过程,可通过.setFromUnitVectors(a, b)
//人正前方从向量a表示方向旋转到向量b表示方向
const q = new THREE.Quaternion();
q.setFromUnitVectors(a,b);//a转向b
person.quaternion.multiply(q);